Saturday, June 23, 2012
Third!!!
The final results of the 2012 MATE International ROV Competition are in, and Tachyon robotics placed third overall!!! Additionally, Tachyon Robotics won the "Best Technical Report" award for the Ranger class, with 79.8 points out of a possible 80. More detailed scores will be posted tomorrow. Thank you to all of our sponsors and supporters!!!!
Friday, June 22, 2012
Competition time!
The International Competition is finally here, and Tachyon MK. III will be competing in the water at 11 this morning and 3:30 this afternoon at the YMCA Aquatic Center on International Drive here in Orlando. If you can't make it out to the competition itself, you can still watch the MATE Center's live stream of the events at
http://materover.org/rov_competition_files/competition_viewer.php.
Thursday, June 7, 2012
Busy times
With just two weeks to go until the competition, we're practicing as much as possible--not just the mission tasks, but also the engineering evaluation. Below is a picture taken during practice earlier this week, with Tachyon Mk. III vertically breaching the water.


Thursday, May 24, 2012
Tech report time....
For the last few weeks, we've been kept busy working on some of the non-technical parts of the competition, working on our tech report (worth 80 points out of the 500 available at internationals) and the poster (worth another 40). We should be back in the water and working on Tachyon Mk. III this weekend, after keeping the ROV out of the water for most of the last month.
Friday, April 27, 2012
Pictures from Practice
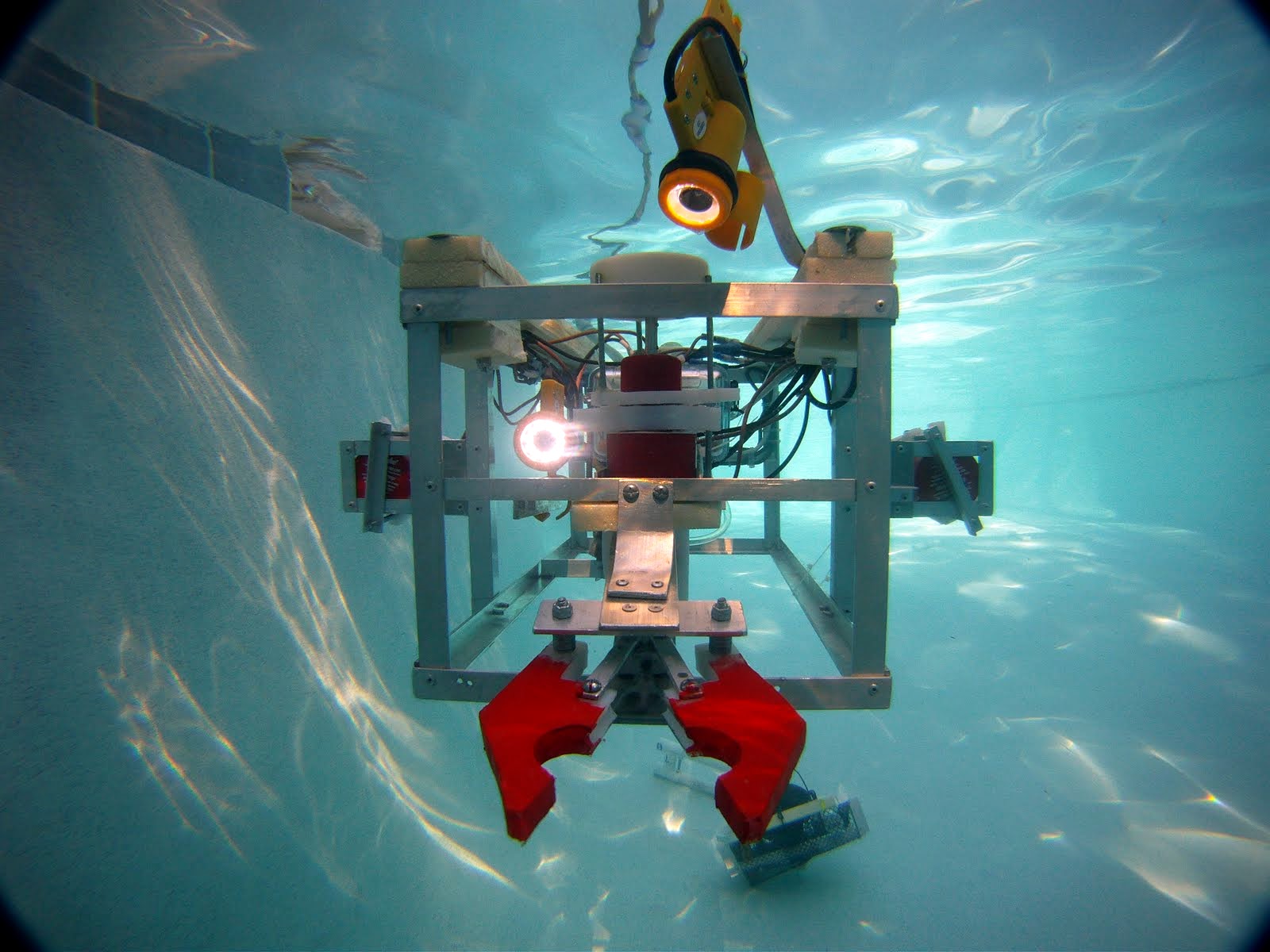
Here's some pictures we've taken over the past few weeks showing Tachyon III in action (although these pictures are from practice, not the actual competition).




Look at that pitch!!!



Sunday, April 22, 2012
Saturday, April 21, 2012
Success!
The Florida Regional competition was held today at the YMCA Aquatic & Family Center, and Tachyon III placed first, with a best mission score of 250! Pictures and video will be uploaded soon.
We'll be moving on to internationals, which will be held in the same location in two months' time.
Congratulations to the entire team, and thank you to all our sponsors!
We'll be moving on to internationals, which will be held in the same location in two months' time.
Congratulations to the entire team, and thank you to all our sponsors!
Sunday, April 8, 2012
Rice Nozzles
 A few months ago, we designed some nozzles based on the Rice profile to mazimize the thrust produced by our thrusters. We finally got those nozzles printed (courtesy of Nikolai at the University of Alabama), and, although we haven't done any quantitative tests of them yet, they seem to have given Tachyon III a significant boost in power and performance.
A few months ago, we designed some nozzles based on the Rice profile to mazimize the thrust produced by our thrusters. We finally got those nozzles printed (courtesy of Nikolai at the University of Alabama), and, although we haven't done any quantitative tests of them yet, they seem to have given Tachyon III a significant boost in power and performance.
Saturday, March 31, 2012
Tachyon swims!
On Wednesday, we had the opportunity to get Tachyon III some time in a full depth pool, and we were amazed by the handling capabilities of the robot. We'd like to thank Trinity Prep Aquatics for giving us access to their pool to test our ROV.
Friday, March 16, 2012
Tachyon III is in the Water!
After months of planing, design, fabrication, and testing, Tachyon III finally entered the water last Tuesday, March 13th. We've been astounded at the increase in maneuverability and speed in this year's bot, and we're excited for the next few weeks of practicing. Today, we began that process, putting a 5 hour run on Tachyon during an 11 hour meeting. Over the next few days, Sam and I will be testing and fine tuning Tachyon for our first practice rounds. Please stay tuned for more videos, photos, and posts as we get closer to regionals!








-Michael Ikegami
Tuesday, March 6, 2012
Update: 3/6/2011
With the regional competition approaching in April, Team Tachyon is only a few days away from having a competition-ready robot. Over the past few weeks, Kieran has been designing and manufacturing a gripper that is ready for mounting on our frame, and Michael and Sam have been finishing and troubleshooting the control and waterproofing systems. Our control system is now fully functional and installed onto our frame, and all that we need to get this robot moving is to install our propellers.
Below are some videos we took of our control system in action. The first shows our X axis and Z axis motors functioning simultaneously (and Sam consequently complaining about the sound). The second, I think, is more exciting; it shows each motor on the X axis being controlled individually--a new feature this year in our control system. Thanks for following us this year, and please stay in tune for more videos, pictures, and posts when we get our bot in the water in the next few weeks.
With the regional competition approaching in April, Team Tachyon is only a few days away from having a competition-ready robot. Over the past few weeks, Kieran has been designing and manufacturing a gripper that is ready for mounting on our frame, and Michael and Sam have been finishing and troubleshooting the control and waterproofing systems. Our control system is now fully functional and installed onto our frame, and all that we need to get this robot moving is to install our propellers.
Below are some videos we took of our control system in action. The first shows our X axis and Z axis motors functioning simultaneously (and Sam consequently complaining about the sound). The second, I think, is more exciting; it shows each motor on the X axis being controlled individually--a new feature this year in our control system. Thanks for following us this year, and please stay in tune for more videos, pictures, and posts when we get our bot in the water in the next few weeks.
-Michael Ikegami and Kieran Wilson
Thursday, February 16, 2012
Getting there...
Everything is starting to come together; the electrical systems were finished a few weeks ago, the frame was done shortly thereafter. The waterproofing is just about done as well, and we should be able to pull everything together with in the next week or so. Last year's frame is on the left; the longer, slightly narrower frame on the right is the basis of Tachyon III.
 -Kieran Wilson
-Kieran Wilson

Saturday, January 21, 2012
An update: January 21, 2012
Over the past few weeks, Tachyon robotics has been working hard to complete our ROV for the upcoming MATE regional competition in April. Meeting 2-4 times a week, we've completed almost every system on the robot and designed ideas for sensors, samplers, and tools to complete the mission tasks provided to us last December. As of today, the main electrical system (excluding sensor bays, which are still in the prototyping phase) is ready to control our ROV, "Tachyon Mk. III." Over the past few weeks, my job has been that of debugging and troubleshooting the three circuit boards that translate the signal put out from our microcontroller into movement for our motors. This process has taken a lot of soldering, desoldering, fabricating and redesigning, but I am incredibly happy with our result.
In a meeting today, I was able to troubleshoot a bug in our circuitry that had caused some minor problems (such as a time limit on our runs due to excess power dissipation by our transistors) that we faced last year using a new tool we were able to purchase with money I had saved up: an oscilloscope. Apart from giving me the opportunity to nerdily plot parametric equations in x-y mode, this new oscilloscope allows us to see the waveforms that potentiate our motors on a scale perfect for troubleshooting and optimizing. Today I was able to use our O-scope to optimize both the frequency of our pulse with modulation and the values of certain pulldown resistors to increase the efficiency and maneuverability of this year's ROV. Below is a picture taken from that process which shows two different waveforms on our oscilloscope's CRT. The upper waveform was taken before I adjusted the values, and the bottom is taken at the end of today's meeting. Note that the lower wave is far more square than the upper. This change will ensure that each movement our pilot makes on the joystick will correspond directly to a change in speed of the ROV. In short, instead of not being able to throttle below 40% before the motors stop turning, as was the case last year, our pilot will be able to have more potentiation between full forward and full stop speeds (from 0% to 1.1% to 100%) on this year's ROV, which will shorten our mission time and lengthen the life of our components.

In a meeting today, I was able to troubleshoot a bug in our circuitry that had caused some minor problems (such as a time limit on our runs due to excess power dissipation by our transistors) that we faced last year using a new tool we were able to purchase with money I had saved up: an oscilloscope. Apart from giving me the opportunity to nerdily plot parametric equations in x-y mode, this new oscilloscope allows us to see the waveforms that potentiate our motors on a scale perfect for troubleshooting and optimizing. Today I was able to use our O-scope to optimize both the frequency of our pulse with modulation and the values of certain pulldown resistors to increase the efficiency and maneuverability of this year's ROV. Below is a picture taken from that process which shows two different waveforms on our oscilloscope's CRT. The upper waveform was taken before I adjusted the values, and the bottom is taken at the end of today's meeting. Note that the lower wave is far more square than the upper. This change will ensure that each movement our pilot makes on the joystick will correspond directly to a change in speed of the ROV. In short, instead of not being able to throttle below 40% before the motors stop turning, as was the case last year, our pilot will be able to have more potentiation between full forward and full stop speeds (from 0% to 1.1% to 100%) on this year's ROV, which will shorten our mission time and lengthen the life of our components.
-Michael Ikegami

Subscribe to:
Posts (Atom)